

Industry Insight: Innovative Grocery Picking Technology
29th November 2017
An insight into the grocery picking technology being explored by Ocado.com, a British online-only supermarket known for innovation and customer service:
Our robotics research team faces a remarkable challenge: to develop smart and generalised robotic solutions and systems capable of picking the 50,000 different items available on Ocado.com safely and reliably. While humans can quickly learn and develop all manner of strategies for grasping various items based on what they intend to do with them, robots need to be taught these strategies and that’s why AI plays such an important role too.
Today we’d like to introduce one of these new and exciting breakthroughs in robotic picking developed by Ocado Technology. The system below has been designed by our robotics research team to pick a range of groceries from our highly automated warehouses called Customer Fulfilment Centres (CFCs).
How it works
To begin with, we considered the complexity and fast-moving nature of our grocery picking process. When you take into account that we fulfil an average of 260,000 orders per week, any automated system we designed had to be capable of picking a vast range of differently shaped objects (our catalogue now includes more than 50,000 SKUs), in any orientation, when stored in a crate with many other objects.
We therefore needed something more complex than a typical industrial pick and place project would allow for. This level of complexity is unique to a grocery warehouse, so who better than our world-class Ocado Technology robotics team to appreciate the constraints and challenges any purpose-built system would need to overcome?
Our new solution is conceptually simple in its design when you compare it to the scale of the task it has been built for. The robot pick station consists of a suction cup on the end of an articulated arm. The arm is equipped with a pipe running to an air compressor, which is capable of lifting items regardless of their deformability and shape, as long as they are within the weight restriction and the suction cup can create an airtight seal with the item’s surface (i.e it has a big enough surface available and is not porous).
The pick stations use an assembly line system where crates of products are delivered by conveyors to a picking point.
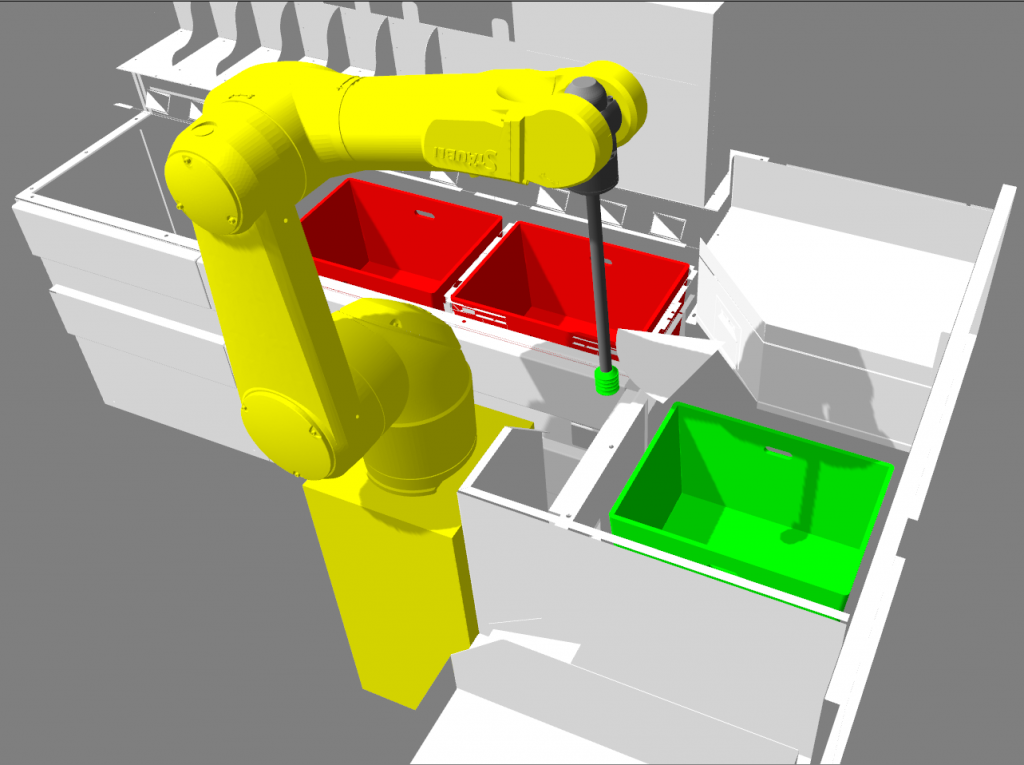
Once the storage crates arrive at the pick station, the job of the robot system is to transfer however many items are needed from the storage crates into the delivery crates destined for the customer. The image below shows the initial concept design of the robot pick station; the green crates are from our storage section, while the red crates are destined for customer deliveries:
Model of the system taking items from storage crates and transferring them into the delivery crate at the pickstation.
In order for this process to run smoothly, the algorithm controlling the robot needed to have an understanding of where the crates were located and of the optimal grasp points of the items within the crate. This may sound simple, but developing the robot’s understanding of its surroundings is very challenging.
We could have embarked on a mission to model every single item in our catalogue, but we knew there must be a quicker and more efficient method. After all, we were keen to enter the production stage of our project, so the team developed the prototype using a 3D vision system that could identify the optimal grasp points that relate to picking one item at a time out of a full crate. The suction cup could then be lowered down to the designated grasping point to securely pick it up and transfer it to the delivery crate. Along the way, the system verifies that the item is the correct product, and determines the optimal orientation to rotate it to, before placing it into the bag.
Built-in sensors avoid the risk of crushing or damaging during picking. The same technology is also used when placing the picked item into the customer crate to avoid items already packed being crushed by other incoming items. Finally, the system also ensures that the items are only released if they can be placed without protruding from the delivery crate.
The fact we found a way to bypass modelling our SKUs also meant that we could pick a greater range of items than many industrial picking systems. All in all, the system is streamlined and flexible, and our robotics team are very proud of the progress they have made so far.